
无人机测绘规范(【技术干货】超燃!无人机测绘の终极奥义!)
注【飞星人】 获得更多技术干货!
当前浏览器不支持播放音乐或语音,请在微信或其他浏览器中播放 The Original High 音乐: Adam Lambert - The Original High (Deluxe Version)
经常看到很多不满足于无人机航拍玩法的老司机表示
“啥时候出个测绘的教程啊!”
于是为了满足各位司机的需求,@±宝宝慷慨献身赞助
本期技术干货——超燃!无人机测绘の终极奥义!

本文以Pix4D系列软件(文末附下载链接)和DJI Phantom系列无人机为例子介绍利用消费级无人机测绘的过程和后期处理方法。本教程适用于精灵系列与悟系列的无人机~
所需软件
移动设备端: Pix4D capture(Android、iOS)
PC端:Pix4D Mapper(非必需,用于后期结果导出,下文会介绍用法,如需要导出处理结果需要注册,价格不菲,可以去官网申请试用)
支持设备:DJI I1 P4 P3S P3A P3P(P2V和P2V+需要使用Pix4Dcapture P2V(+)或者早期版本的Pix4Dcapture使用方法和下文介绍基本一致)
首次使用设置
启动Pix4Dcapture
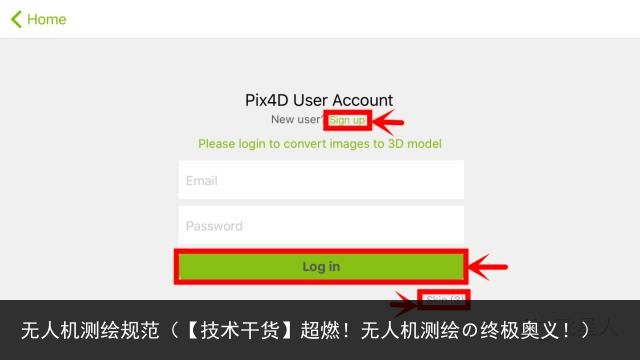
登录界面,可以选择跳过,
建议注册一个账号,后面会用到。
完成后跳转到以下界面。
and,点击左上角SETTING按钮

接着
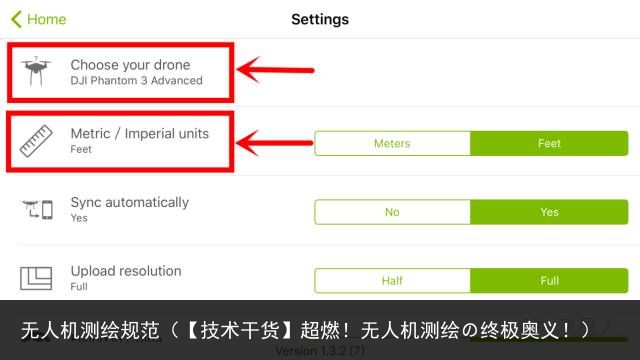
第二项是单位选择,建议改为Meters米制,
要是能驾驭Feet英制不用改也可以,
其他设置用默认值即可。
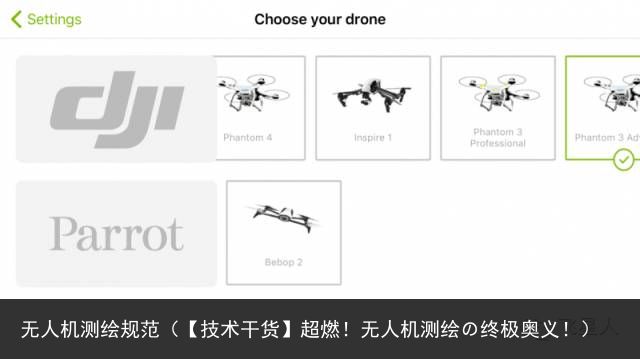
点击第一项,选择你的机型,
选中你的机机(exm??)后返回即可。
温馨提示:以上操作建议在家里提前完成。
测绘需要选天(da)气(tai)好(yang)的时候进行,
所以,不是必须在户外完成的操作
请尽量在有空调WiFi西瓜的室内完成。
毕竟,还没开始就晒晕了传出去还是非常丢人的~
外场飞行
飞行前准备,国际惯例,确保电量充足,
装螺旋桨,开启遥控器,
启动无人机。
连接手机打开DJI GO飞前安全检查、校准,
将无人机放在开阔地带,确保GPS搜星正常。
检查无误后可以关闭DJI GO。
将遥控器切换到F档位(I1 P3A P3P),
P4为切换到P档,
P3S为将S1开关切换到Down Position,
V2/V2+为将S1开关切换到Top Position。(另外可以考虑换个p3了)
切入正题,启动Pix4Dcapture

在主界面选择网格任务。
第一种是单航线模式,获得的影像后期无法精确获得高程信息,所以只适合输出2D的正射影像图,不适合建立3D模型。
第二种是双航线任务,采取了交叉航线的方法,对同一点可以从两个方向获得影像,后期可以精确的计算出地面高程信息,输出结果可以产生3D模型。当然,在测绘相同面积的条件下第二种耗时几乎是第一种的一倍。

定位当前位置
地图/卫星图切换按钮
无人机状态信息
高度设置,100M以内,更高会报警告,政策风险。
任务区域控制点(本文只讨论矩形区域设置)
任务区域移动/旋转(长按边缘的箭头可旋转区域,长按中央的四向箭头可拖动区域)
任务区域长宽信息和预计需要时间
重置所有任务设置
启动任务
根据需要选择测绘区域大小和位置;
飞得高看得广,看得广但看不清;
同一设备在相同的飞行时间内,飞行高度越高可以测绘更大的区域,
但是地面的细节丢失也会越严重,
个人推荐高度为80米(测试机器是P3A),
同时设置的飞行高度需要高于测绘区域内所有障碍物的高度,
否则…DJI售后欢迎您
(P4的视觉避障功能在这里能否起作用暂时不清楚,穷,买不起P4没机会测试,欢迎土豪们来赞助)。
设置完成后点击Start。

然后弹出如上界面,
核对设备高度/区域尺寸参数,
确认无误后直接Next。

确保所有安全检查选项全是绿色的钩,打叉请面壁and自行检查解决,
全绿的点击起飞即可,
无人机在几秒后将会自动起飞并按照航线飞行。
如果地面不适合自动起飞,
可以将无人机手动飞行到待测区域内,
再点击Start开始执行任务。
在无人机自动飞行期间,手不要离开控,
保持无人机在视线范围内,
如出现异常情况及时将遥控器切换到P档(I1 P3A P3P)
手动接管无人机避免发生意外。
航线任务执行完后,
无人机会自动返航至起飞地点并降落,
如地面条件不好,
可在无人机接近地面时手动接管无人机并操控降落,
平安降落后外场飞行部分就结束了。

无人机在降落后会和手机端同步数据,
将SD卡中的影像同步到手机上,
可以现场在太阳下晒得无法分辨人种同步,
也可以回去后吹着空调吃着西瓜同步,
还可以选择不同步。(随你)
后期处理

后期处理需要借助PC或者Pix4Dcloud
按照上图提示有三种方案:
第一种是手机端同步数据后上传到Pix4Dcloud然后在手机端查看,但这种方案只能提供预览效果,不能输出测绘结果,如果只是玩玩测绘,这种方案是个不错的选择,不过必须要注册Pix4D账号。

手机端同步完数据后在主界面打开MISSION MANAGE,
每个任务左上角云的图标绿色代表已上传,
黄色代表未上传,点击未上传的任务。

上传完成后帐号的注册邮箱会收到一封邮件,
云端服务器处理完数据生成模型后会再此收到一封邮件,
点击邮件中的链接就可以查看预览模型和其他输出结果。
第二种方案和第三种方案类似,都需要借助PC端的Pix4D Mapper,区别在于第二种方案不需要手动建立工程,只需要将手机端同步数据上传到Pix4Dcloud,然后再PC端打开Pix4D Mapper并登陆Pix4D帐号。

在软件顶部点击Project查看所有工程。

选择要工程并下载到本地,
下载文件未一个包含工程和图像的Zip压缩包,
解压压缩包并打开.p4d后缀的文件。
处理方法稍后再介绍,
这里先介绍一下第三种方案建立工程的方法。
如不想自己建立工程直接跳到下一条分割线“处理部分”。
————————傲娇的分割线————————
建立工程
先将SD卡中的影像拷贝到PC上,然后打开Pix4D Mapper。
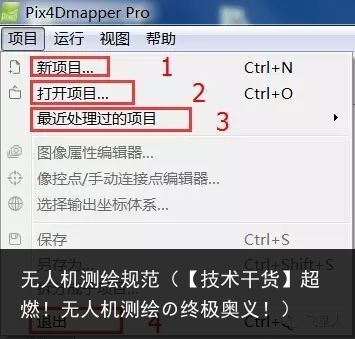
打开 Pix4Dmapper 软件,
选“项目”-“新建项目”,
在弹出来的对话框中设置工程的属性,
如下图所示,选上“航拍项目”,
不勾“植被”和“倾斜项目”,
然后输入工程名字,
设置“路径”(工程名字以及工程路径不能包含中文)。
新建项目选上,然后选择下一步“Next”。
点击“添加图像”,选择加入的影像。
影像路径可以与所建工程文件夹不同,
但路径中不能包含中文字符,点击“Next”。
坐标系试用默认用WGC 84就可以,
地理定位和相机型号在影像的EXIF中都有了,
不用管,直接Next,
然后点击“Finish”完成工程的建立。
————————再次傲娇分割线————————
后期处理部分
点击菜单栏“运行”,选择“本地处理”,
系统出现如下对话框。
第一步,快速检测,虽然不是必须做的,
但是个人还是推荐做一下,
快速检测虽然精度低但是速度快,
可以快速检测出影像是否符合要求,
按图示选择,点击开始。
主要是检查Dataset(数据集):
在快速处理过程中所有的影像都会进行匹配,
这里我们需要确定大部分或者所有的影像都进行了匹配。
如果没有就表明飞行时相片间的重叠度不够或者相片质量太差。
如果质量报告没问题就可以开始高精度处理了。
按图示勾选,开始处理前检查“选项”设置(这里一般都是默认),
也可以根据自己的需要选择,
处理过程通常比较慢,
耗费数小时也是常事,跟PC性能有关。
输出的结果包括质量报告 ,加密点云图,
数字表面模型(DSM) ,数字正射影像图(DOM) ,
数字高程模型等高线(DEM)等,
处理结果可以用于建立数字地图,三维模型等。
在软件中能做的有意思的事情:
1. 曲线对象创建功能,可直接获取高程点、量取地物距离长度;
2.平面对象创建功能,可实现地物面积量取;
3.堆存对象创建功能,可实现体积计算,如下图所示,为堆叠对象创建,可直 接在点云上量取表面积以及体积等物理信息。
那么,整个教程到这里就结束啦。
下期再来疼爱你们~
——————THE END——————
@±宝宝:测绘是一门非常专业和高深的专业,需要丰富的专业知识和专业的设备;作者作为一个业余爱好者只是凭借自己的兴趣用手头设备去学习和摸索,现在将自己一点操作经验分享给大家。
限于文章篇幅,本教程只是简单介绍了利用无人机来做测绘的过程和基本方法,一些细节和高级的操作并未展开说明,如果文中有一些专业方面理解不准确或者不到位的地方大家可以在文章下方评论区指正和建议~
每星期四收看“技术干货”小课堂
早学习,早逆袭
---------------我是分割线---------------
告诉大家一个好消息!
飞星人每周将额外送出两份评论大奖给大家!
最高将送出19499元的悟V2.0一台!来真的哦~!
共设置两个奖项:
1.本周最有价值评论(官方评选)
2.本周单条被点赞数量最多的评论
(备注:按照自然周算,即周一00:00~周日23:59,对当周内所有文章内容下的评论进行筛选)
点击【阅读原文】下载Pix4Dmapper(PC端)