
科创航空无人机(河南科建无人机使用报告之航拍、航测教程篇)
 看过上一篇科建无人机报告的同志应该会感叹无人机在施工当中还能发挥出这么多新奇的作用吧,那么这些应用是如何在无人机上实现的呢?那么接下来我将以本公司使用的大疆MAVIC 2 PRO为例,简单的讲述一下如何用无人机航拍及航测。
看过上一篇科建无人机报告的同志应该会感叹无人机在施工当中还能发挥出这么多新奇的作用吧,那么这些应用是如何在无人机上实现的呢?那么接下来我将以本公司使用的大疆MAVIC 2 PRO为例,简单的讲述一下如何用无人机航拍及航测。
无人机航测处理
一、安全飞行
航线千万条,安全第一条,飞行不规范,亲人两行泪。飞行之前一定要有强烈的安全意识,做到“三不伤害”。炸机事小,伤人事大,情节严重者还要承担刑事责任,所以一定要将安全放到首位。
起飞之前,请连接手机和遥控器,打开APP,连接无人机,确保APP及飞行器固件为最新,以确保各项功能及禁飞区划分为最新状态。飞行前必须确保不在禁飞区,并按照当地政策安全飞行,检查无人机外观情况,尤其是桨叶有无裂痕。随后检查电池电量及传感器各项指标是否正常,若指标不正常,一定要及时校正,以免出现意外。
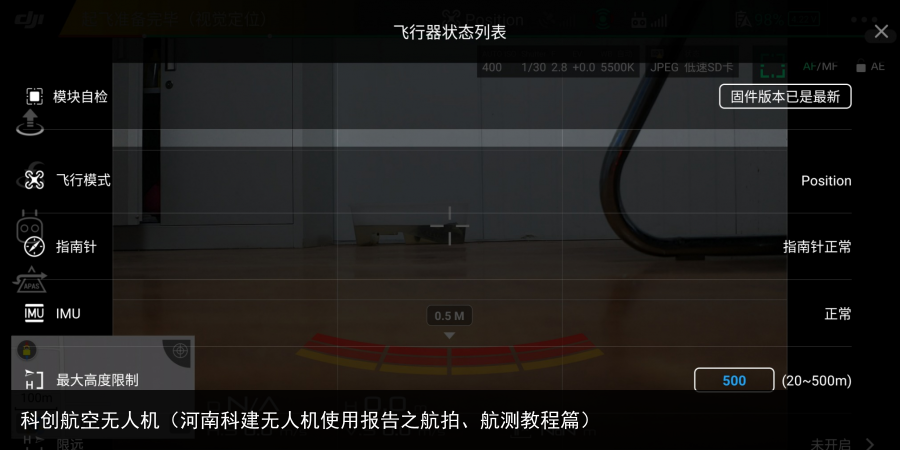
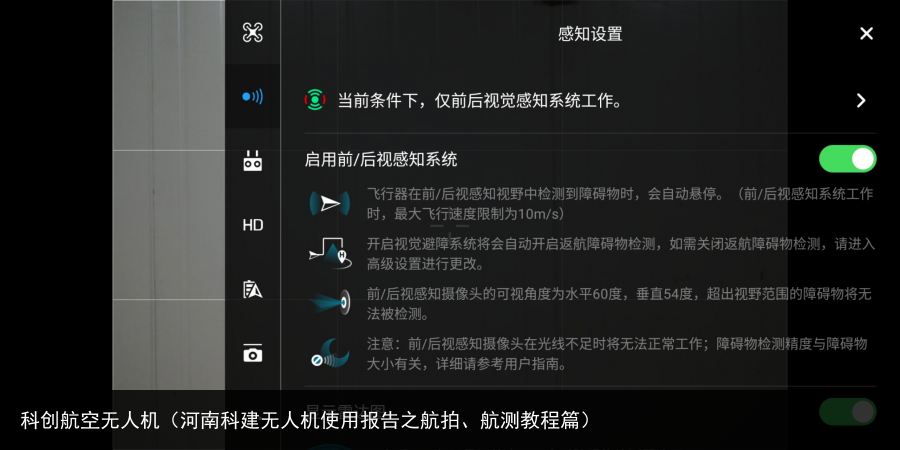
准备起飞之前,需在空旷地区以确保有足够的卫星定位数量,待提示“返航点已刷新”后,才能安全起飞。待起飞之后,先将镜头调整至水平,观察周围有无建筑物并确定最高遮挡物高度,将返航高度设置在飞行范围内最高遮挡物高度以上。在飞行过程中,实时注意周围环境安全,打开避障功能。
二、航拍基本操作
各个型号无人机均能在其官网或包装中有详细说明书,这里就不再赘述了。在拍照阶段,无人机就相当于一架“飞行的相机”,通过调节光圈、快门、曝光补偿、白平衡等参数拍摄出需要的照片效果,也可通过后期用PS等软件处理,得到更加优秀的照片。
在全景照片拍摄中,现在大疆无人机基本都有全景照片拍摄,机器自动在空中从不同方向按照13°、-17°、-47°和-90°自动拍摄26张照片,储存在无人机根目录文件夹中,并自动在机器内部合成全景照片,减少了用户后期拼接的麻烦。但是这种方法合成的照片是经过压缩的,照片大小大约10兆左右,不是高清原图拼接的图像,而且由于无人机云台相机仰角的限制,不能完整拍摄天空。对于追求高画质的朋友,可以从相关论坛下载天空全景图,并且运用PS进行原始照片拼接和换天操作来自己合成2:1高清全景照片。
在得到了2:1全景照片之后,可通过720云网站或大疆发布全景照片。在720云网站(https://720yun.com)注册并登陆后,点击发布,上传全景照片,并进行相关设置,网站会生成全景图,之后可通过分享生成链接或二维码进行分享。

视频拍摄方法也比较简单,在视频拍摄中,最重要的就是拍摄和飞行技巧,只有在不断积累的情况下才能熟练掌握。大家可以在相关论坛(推荐大疆的天空之城)上观看别人拍摄的视频,从别人的视频中,学习取景、飞行路线、光线运用等技巧。如果条件允许的话,用双遥控器操作,一人负责操控无人机飞行,另一人负责操控云台。如果需要后期调色,建议使用H.265编码,色彩选择Dlog-M格式,方便后期调色。达芬奇调色软件还是比较常用的,操作方便、占用电脑资源少,推荐使用。


三、航测基本操作
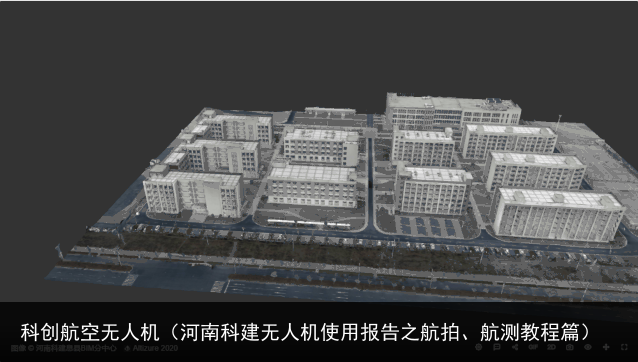
航测,现在也叫摄影测量与遥感。实景三维建模技术能够根据一系列二维相片,或者一组倾斜影像,自动生成高分辨的、带有逼真纹理贴图的三维模型。如果倾斜像片带有坐标信息,那么模型的地理位置信息也是准确的。这种模型效果逼真,要素全面,而且具有测量精度,不仅带给人身临其境之感还可用于测量学应用,是现实世界的真实还原。
 航测基本分为三个阶段,及数据采集阶段,内业操作,成果运用三阶段。
航测基本分为三个阶段,及数据采集阶段,内业操作,成果运用三阶段。
1、数据采集阶段
在数据采集阶段,最终目标是采集到符合预期效果的航拍图。为了完成这一目标,可细分几个步骤:目标确定→熟悉场地→规划航线→执行航线并拍摄→数据整理。
1)目标确定
有的放矢才能事半功倍,在进行航测之前,需要确定自己需求。如果进行较为平坦的大面积地形航测,可进行正射影像拍摄;如果用于建筑物、基坑等高差较大的场地拍摄,可进行倾斜摄影拍摄。
2)熟悉场地
拍摄之前,需要到场地观察四周情况,并试飞,以观察周围障碍物高度,信号干扰情况、地质地貌特点、地物复杂程度、特征点或坐标点等,还要注意计划拍摄期间的天气情况。用喷漆或标靶设置相关控制点,以便后期和图纸重叠,有条件的可以用GPS测出控制点空间三维坐标,用于后期校准。


喷漆及标靶设置控制点
3)规划航线
在确定了拍摄范围后,通过手机端APP来规划航线。在航线规划方面,DJI Pilot、Pix4Dcapture都是比较不错的免费软件,下面以大疆的DJI Pilot为例讲解一下具体操作。
a.连接无人机、遥控器、手机,打开APP,确保APP成功连接无人机。

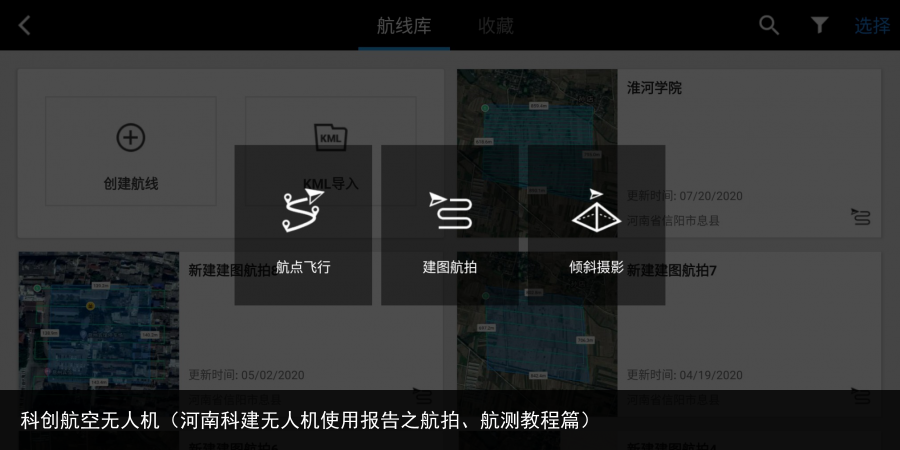
b.点击航线飞行,根据需要选择航点飞行、建图航拍、倾斜摄影。
航点飞行需要自己手动设置每一个航点,在道路、桥梁等狭长地区选择。建图航拍即相机垂直向下俯拍,多用于正射投影图像生成,仅覆盖测区一条航线,拍摄时间较倾斜摄影大幅度缩短。倾斜摄影需要在测区执行5条航线,及正射影像拍摄和东南西北四方向倾斜拍摄。
c.根据需要,在地图上绘制测区,软件自动生成航线,并显示航线长度、预计时间、航点数、照片数及测区面积,这些数据方便我们针对无人机续航能力、储存容量、后期电脑端处理压力等进行调整飞行参数。还可以根据需要,对重点区域单独加密航测,也可分高度、分航线对区域进行航线规划,后期通过软件将不同时间、不同高度、不同俯仰角的素材进行处理,得到所需成果。
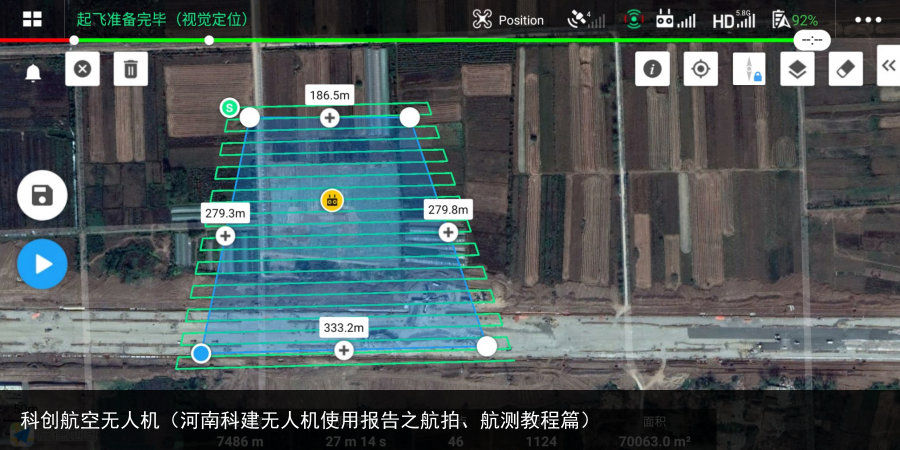
分高度、分区域对高耸物体进行航线规划

d.点击右上角左箭头“《”,打开参数设置。
飞行高度越低,拍摄效果越好,照片越清晰,但是在其他条件不变的情况下,所需时间越多,照片数量越多,反之亦然。起飞速度及从起飞点飞往起始点的速度,这个速度可以往快了调,以节省时间。航线速度及无人机在执行航线任务时的速度,理论上航行速度越快,越可以节约时间,但是由于执行任务期间,无人机在运动中拍照,而该无人机搭载的相机使用的CMOS传感器是在曝光时逐行扫描,以至于在无人机高速运动的情况下发生“果冻效应”,使照片拍摄的范围小于静止时拍摄的范围,对模型的精度产生影响。因此对于速度的调节一定要按实际需要,综合续航、精度来进行合适的调节。

飞行高度、速度调节页面
e.打开高级页面,设置重叠率
航测所需照片必须有一定重叠率,才可以通过照片的重叠区域相互对比、校正生成点云。理论上重叠率越高,最终成像越精密,但是重叠率高导致照片数量增加,旁向重叠率还会影响航线长度,从而影响续航和内业工作量,因此设置重叠率也要综合考量,根据需要,设置合适的重叠率。精细实景模型重建建议采集航向重叠不小于70%,旁向重叠不小于50%;仅仅用于生成拼接图片,可适当减小重叠率,以节约航行时间和内业处理时间。
f.起飞,航测
待相关参数设置完毕,点击左侧蓝色按钮开始上传任务到无人机,随后执行航线任务。此时无人机自动原地升到设定高度,并飞飞向起始点。此时必须确保场地相对空旷,避免炸机。若飞行过程中,电量不足,请及时返航,航线任务自动暂停,更换电池后,可继续航线任务。飞行过程中需根据信号强弱调整天线角度,以免断连。
4)数据整理
拍摄完成后,需要对数据进行整理。用数据线将大疆无人机拍摄的照片备份到电脑上,由于大疆无人机照片命名以1000张照片为一个循环,若拍摄照片数大于1000,则需要对照片进行重命名,以避免影响后续工作。由于个别国外无人机测绘软件对中文支持不足,尽量使照片保存路径不出现中文。
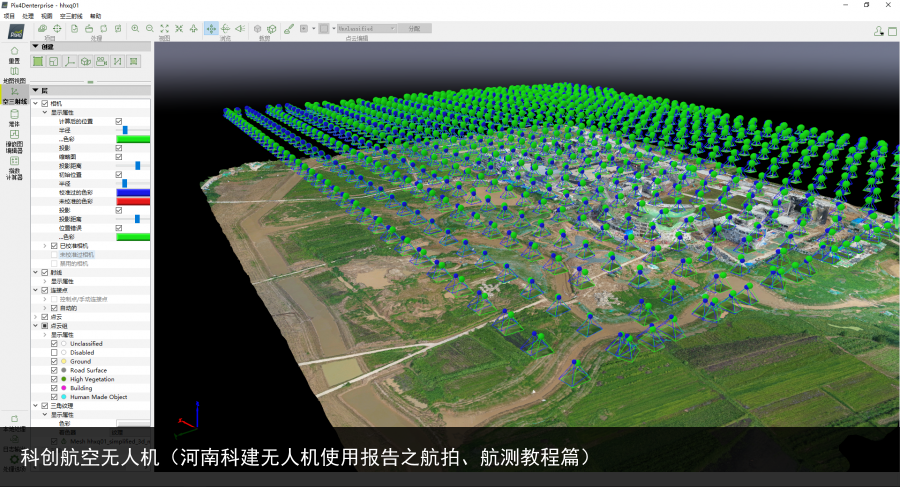
2、内业操作阶段
搜集到足够的航拍素材,需要对这些素材进行进一步整理,才能生成需要的成果。此时便需要一些软件的帮助,将二维图片转化成三维实景模型以及等高线、DTM、DEM、DSM、DOM等成果。
常用的三维重建软件有Pix4Dmapper、Altizure(网站即将关闭)、ContextCapture(原名Smart3D)、Photoscan等。下面就以Pix4Dmapper为例,简单介绍一下操作步骤。
1)打开Pix4Dmapper,新建项目,尽量以英文命名
2)添加素材,以照片为主,大疆拍摄的照片中含有EXIF数据,包含坐标、高程等信息。视频也可以导入,通过设置,软件截取关键帧,用于模型的生成。
检查并编辑照片属性,对于大疆锁拍摄的图片,由于包含比较完整的EXIF数据,因此坐标系、相机型号等信息不需要再进行导入处理,直接点击next即可。
在模版选择页面,软件会列举处几个常用的照片处理模板,可以根据需要,进行模板选择。
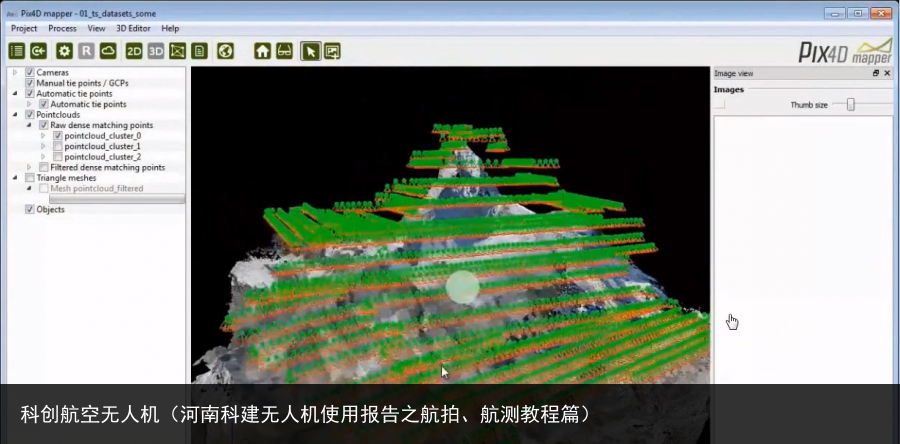
3)调整参数,自动处理,生成结果(该过程对电脑的CPU和内存占用较大,建议使用高配电脑或服务器)
点击处理选项,对初始化处理、点云和纹理以及DSM,正射影像和指数选项中根据需要选择相应的选项,也可选择成果导出选项,用于对数据进行下一步分析。(注意:可根据实际需求和计算机运行速度,适当调节精度,以便达到精度和处理时间的平衡)
根据需要勾选相应的成果输出,用于生成相应的成果。
待本地处理三选项成绿色时,表示该阶段任务处理完成,每完成一步,软件会自动生成质量报告,我们可以根据需求,对照质量报告,来对一些参数进行调整或者增加图片以满足使用需求。
接下来就是对生成的成果做进一步处理,来生成我们需要的结果了。
3、成果应用
由航测生成的一系列模型也可以作为成果来展示,当然还可以将以上成果进行进一步加工,使之发挥一些新用途。
将生成的正射投影照片和工程图纸叠加,以便校对由于变更对工程的影响,或查看工程进度。
(注意:若用于将正射投影图像与图纸叠加,在进行航测飞行之前,必须设立参照点,并用醒目的方式标记出来,以方便在CAD图纸上进行对齐命令。参照点可以是现场坐标点,可以的图纸上标注的结构坐标点,只要是现场可以清晰的拍摄到的,且能够和图纸能够对应的点位都可以作为参照点。)
在输出状态窗口点击正射影像图上的文件夹标志,可以定位到生成的正射影像图所在的文件夹,图形为TIF格式,由于有些图像比较大,可以用PS将其转化成小体积图像,以便在AUTOCAD里流畅运行。
在CAD中,在插入选项卡中点击附着按钮,添加图片,将图片附着到图纸上。
使用修改中的对齐命令,将实现标记的参照点和图纸上的参照点对齐,将图纸缩放成图纸大小,此时就可以将图纸与正射影像图进行比对了。
2)同理根据上述方法,找到生成的等高线,可以使等高线和图纸进行重叠,对前期场布以及施工方案都有辅助作用。
3)在Pix4Dmapper里点击进入椎体选项卡,可以添加测量,设置基准面,通过计算,可以生成需要的填、挖方体积、面积、长度等信息,对物料体积,挖方体积有个比较精确的估算,有利于施工计划及材料计划的调整。
4)生成基于实景三维模型的动画,用于视频素材。
仅仅无人机的官方使用说明书就有几十页,在加上各种软件的说明书,起码有几百页,更别说其中包含的航测、相机原理等其他学科,无人机应用是一个集多种学科的综合性的领域。鉴于篇幅和设备,本文只是简单的介绍一下本人在工程中使用消费级无人机的一些心得,以上教程只能给各位提供一个参考方向,若搭载一些专业设备,无人机还可以有更广阔的用途。若想要真正玩转无人机,用好无人机,还需要在日常中多学习,多探索,多研究他人的摄影作品、论文、帖子等,根据工作中的实际需求,来挖掘无人机的潜力,从而为企业提供更多生产力。
图文:BIM中心 郑楠 编排:小孔成像