
无人机倾斜摄影工作流程(无人机倾斜摄影测量技术,在建筑施工中的应用)

文 | 夕颜TALK
编辑 | 夕颜TALK
前言
近几年来,建设事业蓬勃发展,极大地改善了人们的生活质量。随着我国建筑业的快速发展,高耸、超高层建筑层出不穷,其施工现场环境日趋复杂,安全管理与质量进度监控困难,调查与追踪困难。

在安全管理和质量进度监控方面,传统的方法是通过人巡、视频监控和手工检查来实现的。人工巡视工作量大,效率低,爬上爬下存在安全隐患。
由于视频监控不能获得建筑工地的立体定位和空间尺度信息,且视角固定,有很多盲区,限制了其应用;手工检验工作量大,效率低,在操作过程中存在安全问题。

在新的时代里,我们国家的科学技术得到了飞速的发展,民用无人机技术也变得更加成熟。伴随着无人机应用的平民化和智能化,近几年来,无人机倾斜摄影测量技术作为一种测绘新技术得到了越来越多的应用。
它在地形图测绘、城市规划、历史遗迹保护、交通和土木工程等领域得到了越来越多的应用。

利用无人驾驶飞机倾斜摄影测量建立的真实场景3D模型,具有高可视性、高真实感、高精度、可测量性等优点,其在工程建设中的应用,对提高工程建设管理水平具有重要意义。
一、无人驾驶飞机倾斜照相测量的理论与系统需求
1、无人驾驶飞机倾斜照相技术的基本理论

无人驾驶飞机倾斜照相测量技术是利用无人驾驶飞机在无人驾驶飞机上安装多个视角的多镜头照相机,实现多视角成像;也可以安装一个摄像头,改变摄像头的角度,进行多个摄像头的拍摄。
它的技术原理与竖直航拍的方法有很大区别,竖直航拍相机的主光轴是竖直的,因此很少能获得地面的侧面信息。而无人机斜直摄影测量技术则可以解决这一问题。

它是利用无人机的超低空飞行,多相机、多角度摄影,或者是单一相机的多角度摄影,来获得地面上地面上的高分辨率、高清晰度的图像,并经过数据处理来建立真实的真实的三维模型。
2、无人驾驶飞机倾斜照相测量系统的需求
建设区域的面积通常控制在0.5km2以下,无人机的选择一般是消费级的多旋翼航拍无人机,或者是商业无人机,具有较高的安全性,操作简单,成本低等特点。

无人机携带的照相机一般选择单反,并且最好不要少于两千万的像素;在无人机上安装能够提供高精度 POS数据的 RTK模块是可取的。
无人驾驶飞机地面观测系统通常采用手机、笔记本或者平板等与遥控装置相连的方式,对无人驾驶飞机及其摄像机的运行状态进行遥测和监测。

目前国际上广泛使用的地面观测系统软件主要有: DJIGSPro, GSRTK, DJIPilot,易飞无人驾驶系统, Altizure,Pix4d, RockyCapture等,其主要功能有:一键起飞,自动巡航,智能规划,自动化作业,大任务规划,断点续飞。
现在,在倾斜摄影测量数据处理系统方面,主要的软件包括了 ContextCapture、PIX4Dmapper、 AgisoftMetashape、街景工厂、瞰景眺望Smart3D实景三维建模系统、大疆智图和DP-Modeler等。

二、施工现场3D建模技术的探讨
1、外业作业
像控点测量:为了提升无人机倾斜摄影测量的精度,以及坐标系的转换,在建筑施工区域的周围以及中间开阔的位置上,对像控点进行均匀地布设,并对像控点的坐标和高程进行精确地测定,因此建议使用网络 RTK控制点测量的方法来测定像控点的坐标和高程。

需要指出的是,施工工地场地繁忙,空间紧凑,施工过程中的建筑水平变形较大,因此,不能将控制点设置在施工中的建筑顶部和周围,而应该设置在施工干扰少、稳定和开阔的地方。
无人机倾斜摄影:首先,将无人机准备好,然后在地面站软件上对倾斜飞行航线进行规划,并对相机参数进行设置。

之后,无人机会根据任务航线和动作,自主地按航线进行飞行航拍,并获得多角度图像数据,最终将无人机倾斜摄影完成。在施工现场,尤其是高层建筑、塔式起重机、空中电线众多的情况下,尤其要注意航空测量的飞行安全。
2、内业作业
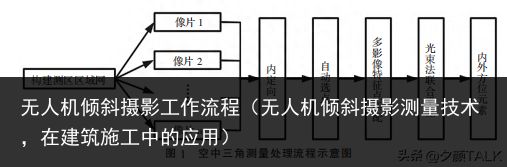
无人驾驶飞机倾斜摄影测量的数据处理过程主要包括数据前处理、空中三角测量、点云生成、三角网构建、纹理制图等环节。
从无人机上下载现场采集到的照片及 POS资料,核对资料的完整性,照片的颜色及清晰度,并核对 POS资料与照片资料的一致性。

在此基础上,利用图像数据、 POS图像信息及像控点信息,构造测区范围网络,并利用摄像机的初值,在每一幅图像的内部方向上,建立像平面坐标系统。
在此基础上,利用 SIFT算法对每一幅图像进行特征点的提取,从而完成对每一幅图像的自动选取;然后,通过对多个角度图像的相似性分析,来完成图像中的特征点的匹配。

最后,以 POS、像控点等数据为补充数据,采用射束法进行平差,分别以过像点、照相中心和目标点三个光束为平差单位,基于共线性方程,进行联合平差,最终获得密集点的地表坐标和影像的精确外向要素。
稠密点云构建:在进行空域三角化操作后,产生稠密点云,获取摄像机外方位要素,并确定图像间的相对位置关系;利用多角度多视角图像,采用 SGM, SURE, PhotoScan, PlaneSweep, PMVS, PatchMatch等方法进行稠密匹配,以实现大规模稠密点云的快速构建。

三角网的构造:利用 RBF算法, MLS算法, Poisson算法, Crust算法, Cocone算法, RobustCocone算法, BPA算法,流形网格增长算法, IPD算法,以及包围球算法等,将稠密的点云构造为大量的不规则三角网 TIN。
纹理映射:以 TIN模型为基础,通过对遮挡识别、多视影像映射源的选择,使用霍夫变换和广义M-估计样本一致性等算法,将倾斜影像上的像点的颜色映射到 TIN模型表面,从而生成实景三维模型。

三、工程实务的探讨
以兰州一处建筑工地为例,该工地占地面积为50000平方米,占地面积为75公顷(1公顷相当于667平方米);该基地的平均高度在1520米左右,基地内有近100米的高层建筑,150米以上的超高层建筑,还有一座或两座施工临时用房等。
1、无人驾驶飞机斜视照相测量系统的选型
在工程实践中,我们使用的是大疆精灵4 RTK无人机,它的飞行时间最长大约是30分钟,它的重量是1391 g,它的最大起飞高度是6000 m,在定位模式下,它的最大飞行速度是50 km/h,它的相机是1英寸的 CMOS传感器,它的有效像素是两千万,有效画幅是5472像素×3648像素,焦距大约是8.8 mm。
本项目拟采用机载多频率、多系统 RTK GNSS,实现横向1 cm+1 ppm、纵向1.5 cm+1 ppm的高精度 RTK GNSS。地面观测站使用的是Game4型 RTK无人驾驶飞机自带的屏幕遥控装置 DJIGSRTKAPP。利用Con-textCapture软件对倾斜摄影测量进行了数据处理。
2、无人驾驶飞机倾斜摄影测量的野外作业
图像控制点及检查点的布设及测量:在实际的试验中,图像控制点的布置有3种。从图1可以看出,共有7个图像控制点,从C1到C7,其中5个是场地周边,2个是场地内(C6和C7)。在测区内,设置了由J1到J10等10个检查点,J9、J10等设在建筑物顶部,利用网络 RTK技术对像控点、检查点进行测量,并对它们进行定位、高度测量。
无人驾驶飞机斜拍:航路规划采取总体航路+局部贴近航路+重点地区过度贴近航路的战略,见图2。在全角度拍摄的航路上,为了保证操作的安全性,为了节约电力,飞机的起飞点选择在大楼的最高处;考虑到塔吊自由端的最大高度大约在30米左右。

因此选择的航高是相对高度30米(相对最高的建筑物顶部),屋顶分辨率为0.008米,因为建筑物高150米,所以整体航线对于地面的航高是180米,所以地面分辨率大约为0.05米。
在局部接近法方面,以建筑表面为例,选取一条平行于建筑表面的表面接近法,该接近法距离建筑表面30米,建筑表面分辨率为0.008米。针对关键部位建筑物顶端的工作面,在距建筑物表面10米的高度上,通过超近距离测量获得了0.003米的分辨率。各航路的正向和侧向交叠比例为80%,摄像机倾斜角度为45度。

3、无人机地面倾斜摄影测量的内业作业
利用 ContextCapture,通过数据准备,数据输入,像控点布点,空中三角测量,以及3D重构,建立真实场景的3D模型。图3是一个三角形网格模型,而图4是一个贴图后的真实场景的3D模型。

4、不同的图像控制点布局模式的精确性
将3种不同控制点布局方案获得的观测点坐标、高程与 CORS RTK测量的观测点坐标、高程进行比较,计算观测点位置误差、高程值,评价3种控制点布局方案的精度。结果显示在表2中,在方案1的检查点中,地面检查点J1到J8的位置坐标误差的平均值是0.181米,高程误差的平均值是0.037米。
方案2检查点的地面检查点J1到J8的位置误差平均为0.166米,高度误差平均为0.034米;在方案3的检查点中,地面检查点J1到J8点位坐标误差的平均值是0.166 m,高程误差的平均值是0.030 m,而在屋顶的检查点J9和J10的坐标和高程误差方面,3个方案基本上是相同的。

J9、J10两个检查点都有很高的精度,可以看出,近、过近、过近斜摄影测量可以有效地增加地物的分辨能力,并提高模型的精度;与计划1、计划2相比较,在测区内侧增加一个像控点的情况下,检查点J1~J8的位置坐标的平均偏差从0.181米增加到0.166米,增加了8.3%。
通过与方案2、方案3的比较,在增加外围、内圈图像控制点的情况下,检查点的平均位置误差没有变化,因此,在提升精度方面的作用并不显著。通过3种象控点方案的比较,得到的平均高程误差基本一致。
5、用于建设工程的无人机倾斜摄影测量技术
利用无人驾驶飞机倾斜摄影测量获得的真实三维模型,可以快速生成数字绘图(DLG)、数字正射图像(DOM)以及数字栅格图(DEM),为工程建设提供综合的空间数据参照。通过在实际工程中的运用,取得了很好的效果。
第一,利用无人机倾斜摄影测量的真3D模型,可以实现对施工现场的三维可视化,为工程决策提供一个直观可靠的数字孪生工地,从而更好地恢复施工现场,更好地服务于智慧工地的管理。
以可测量的真实场景为基础,可以帮助现场的工程测量员绘制地图,获得测量数据,帮助他们进行一些建筑测量工作,比如点位放样、面积测量、体积测量等,从而提高他们的工作效率,减少他们的人力费用。
将真实的3D模型与 BIM模型进行重叠,实现虚拟施工场地布局及进度管理的可视化,并与 BIM模型进行比较,分析工程进度及误差,实现工程场地管理的数字化。
在此基础上,实现对建筑物外立面构件尺寸、裂缝分布及构造缺陷的精确检测,减少了高空作业的工作量,保证了施工的安全。
结语
建设工程正朝着高质量发展迈进,建设工程的数字化和智能化是建设智慧工地的关键,本文以建设工程为背景,以建设工程为背景,对建设工程中的无人机倾斜摄影测量系统进行了选择,对内部和外部工作流程进行了论述。
并以实际案例为依据,构造出了“整体航路+局部贴近航路+重点区域超贴近航路”的策略,为建设工程提供了一套适用于建设工程的无人机倾斜摄影测量技术方案。




